Abstract
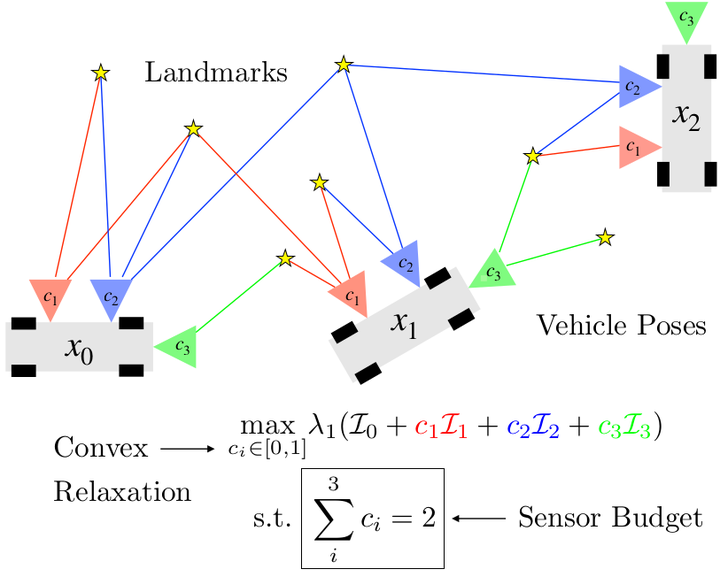
The number and arrangement of sensors on an autonomous mobile robot dramatically influence its perception capabilities. Ensuring that sensors are mounted in a manner that enables accurate detection, localization, and mapping is essential for the success of downstream control tasks. However, when designing a new robotic platform, researchers and practitioners alike usually mimic standard configurations or maximize simple heuristics like field-of-view (FOV) coverage to decide where to place exteroceptive sensors. In this work, we conduct an information-theoretic investigation of this overlooked element of mobile robotic perception in the context of simultaneous localization and mapping (SLAM). We show how to formalize the sensor arrangement problem as a form of subset selection under the E-optimality performance criterion. While this formulation is NP-hard in general, we further show that a combination of greedy sensor selection and fast convex relaxation-based post-hoc verification enables the efficient recovery of certifiably optimal sensor designs in practice. Results from synthetic experiments reveal that sensors placed with OASIS outperform benchmarks in terms of mean squared error of visual SLAM estimates.